Complete EtherCAT Controller Platform with Integrated Motion and PLC Control
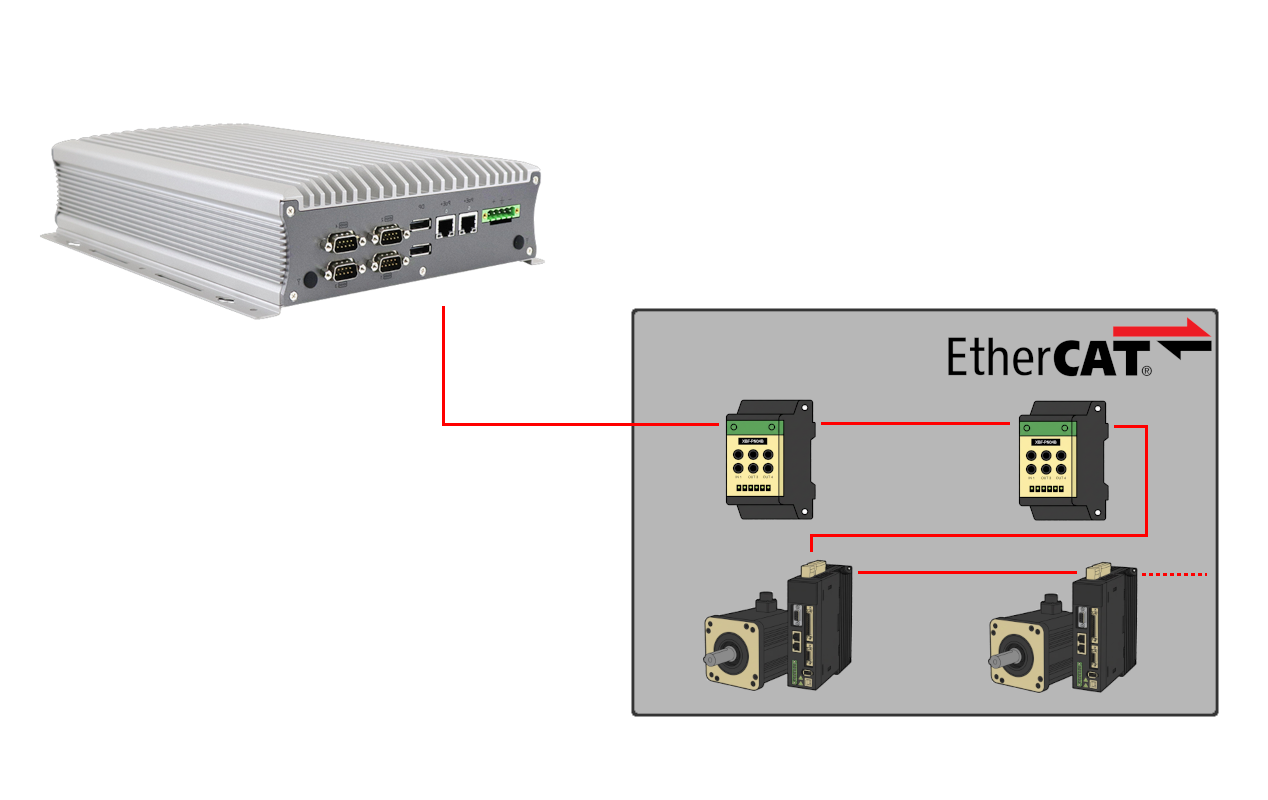
The EM4 is an EtherCAT Industrial PC System combining industrial-grade computing hardware, real-time operating system, and EtherCAT network controller functionality in a single platform. Designed for deterministic motion control and PLC applications, the EM4 eliminates integration complexity by delivering a pre-configured, tested system ready for deployment in factory automation, CNC systems, and advanced manufacturing equipment.
System Architecture
- Intel i5 processor as the main processing module
- Windows general purpose operating system
- TenAsys INtime or Realtime-Linux (Xenomai Cobalt, Preempt-RT) real-time operating system
EtherCAT Controller Features
- Distributed Clock synchronization
- Cable Redundancy
- Deterministic Process Data Object (PDO) cycle
- Supports CiA402 Drive profile
- Graphical EtherCAT Master Configurator tool
Motion Control and PLC Capabilities
- Up to 32 motors
- Up to 16 interpolated axes
- Motor-Axis association (Axis Define)
- Motion Program execution
- Periodic PLC processing
- Various motion movement types
- Data gathering for system diagnostics
Flexible Software Architecture for Industrial Automation
Power Your Automation with Precision, Performance, and Flexibility
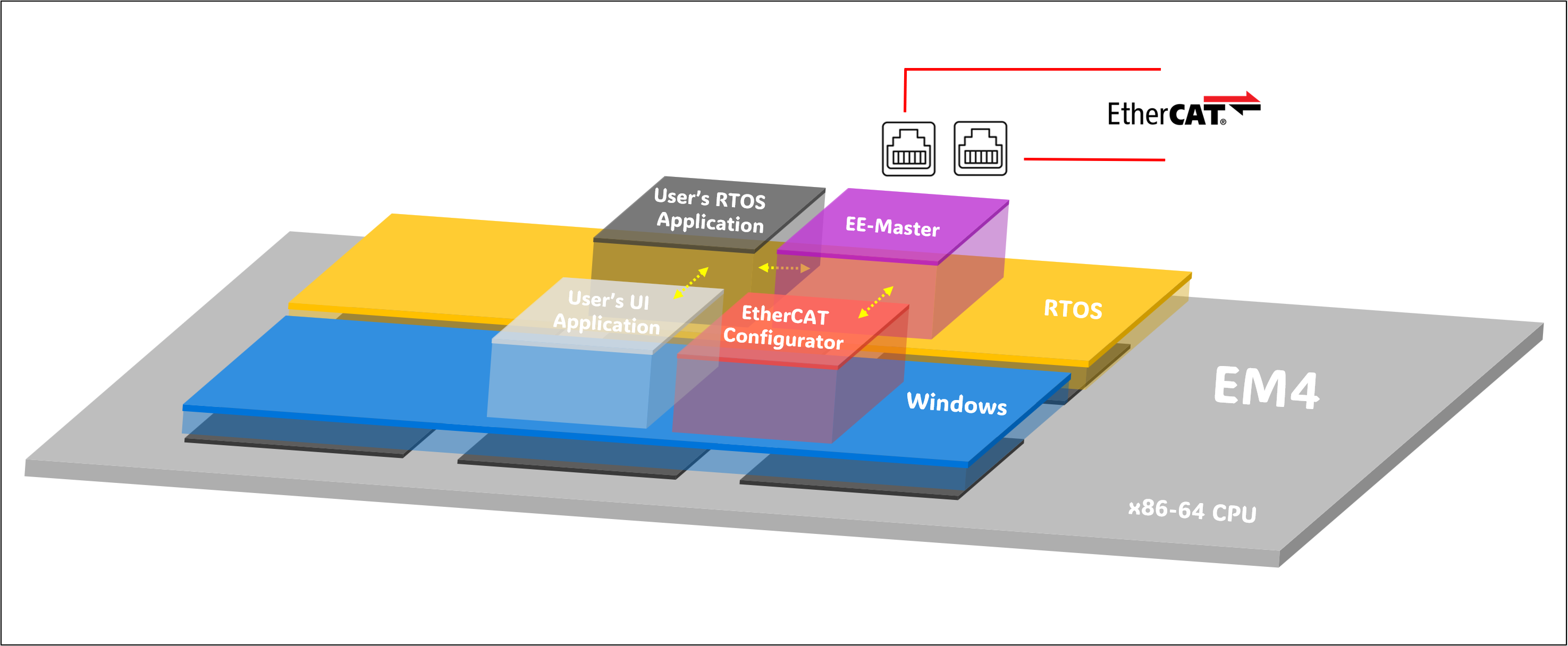
Use Case #1 – Build Your Own Brilliance
Custom User Applications
Develop tailored applications on top of the EtherCAT network controller stack for complete control and customization of machine behavior and automation logic.
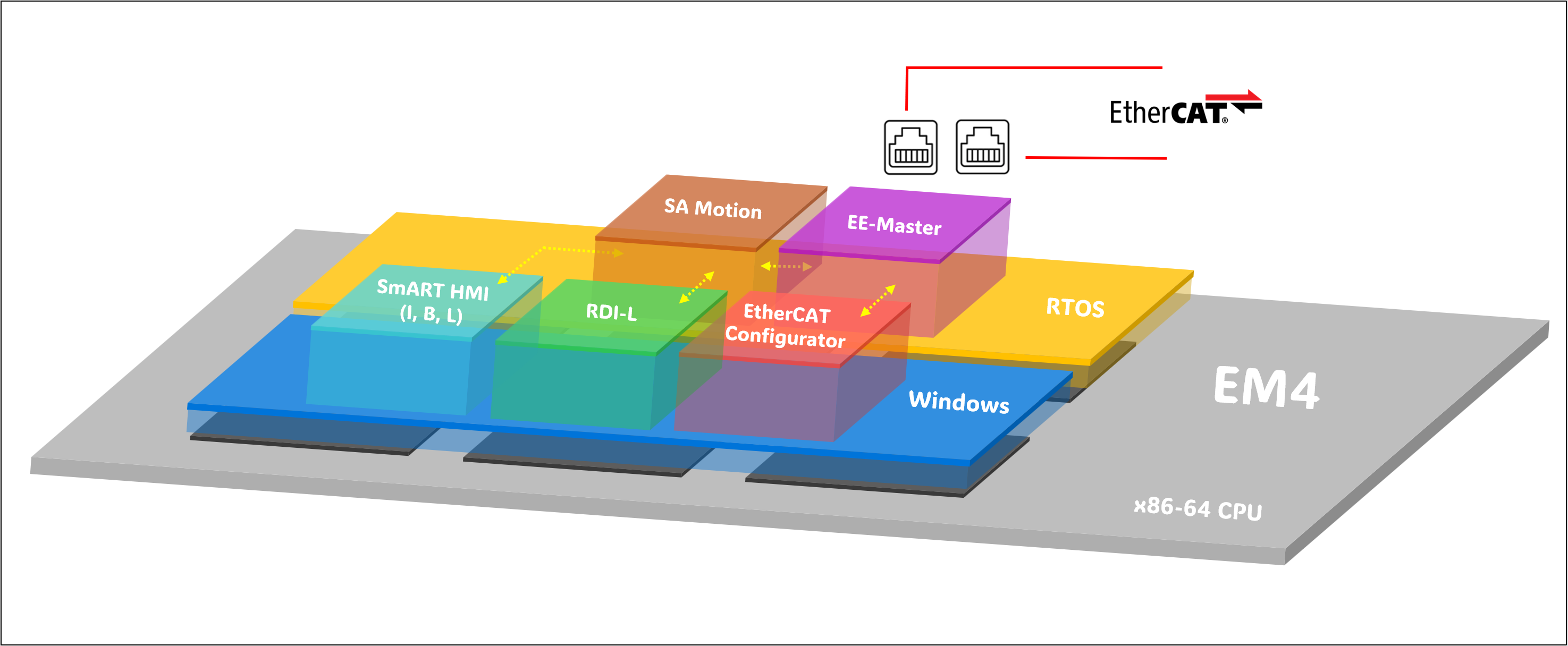
Use Case #2 – High-Precision Motion Made Simple
Motion Applications with Field-Proven SA Motion Library
Deploy deterministic motion control using Sodick America’s SA Motion Library, validated in industrial automation for over 25 years. The integrated architecture ensures coordinated multi-axis control with microsecond-level timing precision.
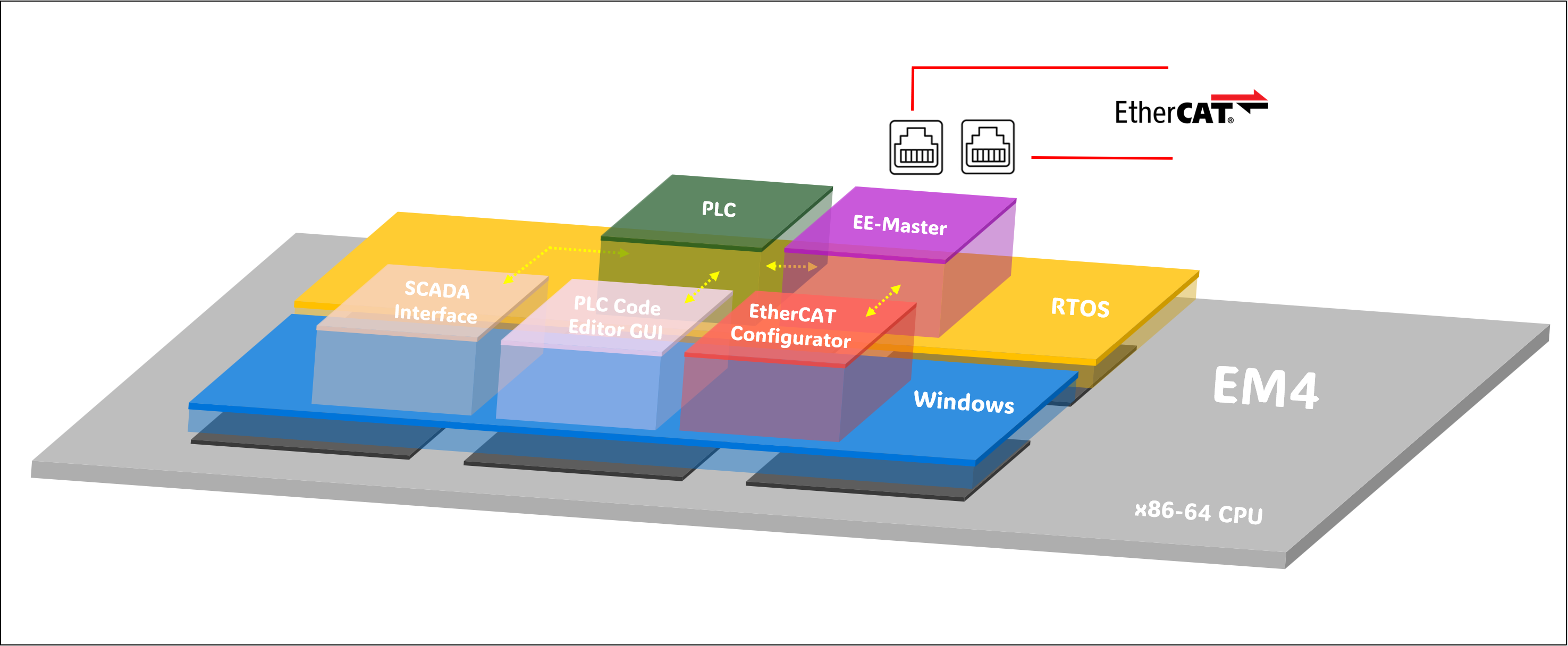
Use Case #3 – Your PLC, Your Way
IEC 61131-3 PLC Development
Create deterministic PLC applications using our standards-based PLC code editor. The real-time operating system ensures consistent scan times and reliable control logic execution for process automation and machine sequencing.
Use Case #4 – Synchronize Like a Pro
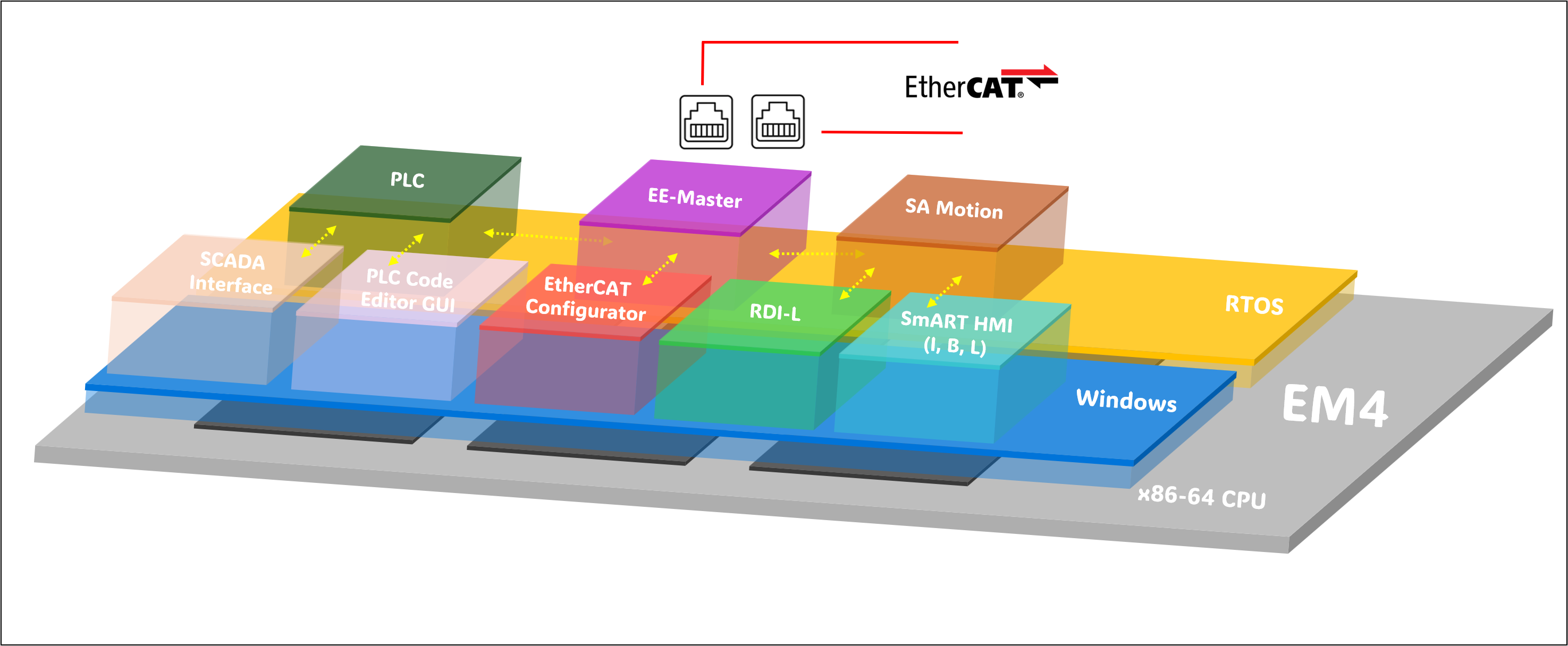
Integrated Motion & PLC on a Single EtherCAT Master
Combine motion and PLC applications seamlessly on a shared EtherCAT network controller, enabling coordinated control with minimal latency between motion commands and logic execution.
Use Case #5 – Master the Network
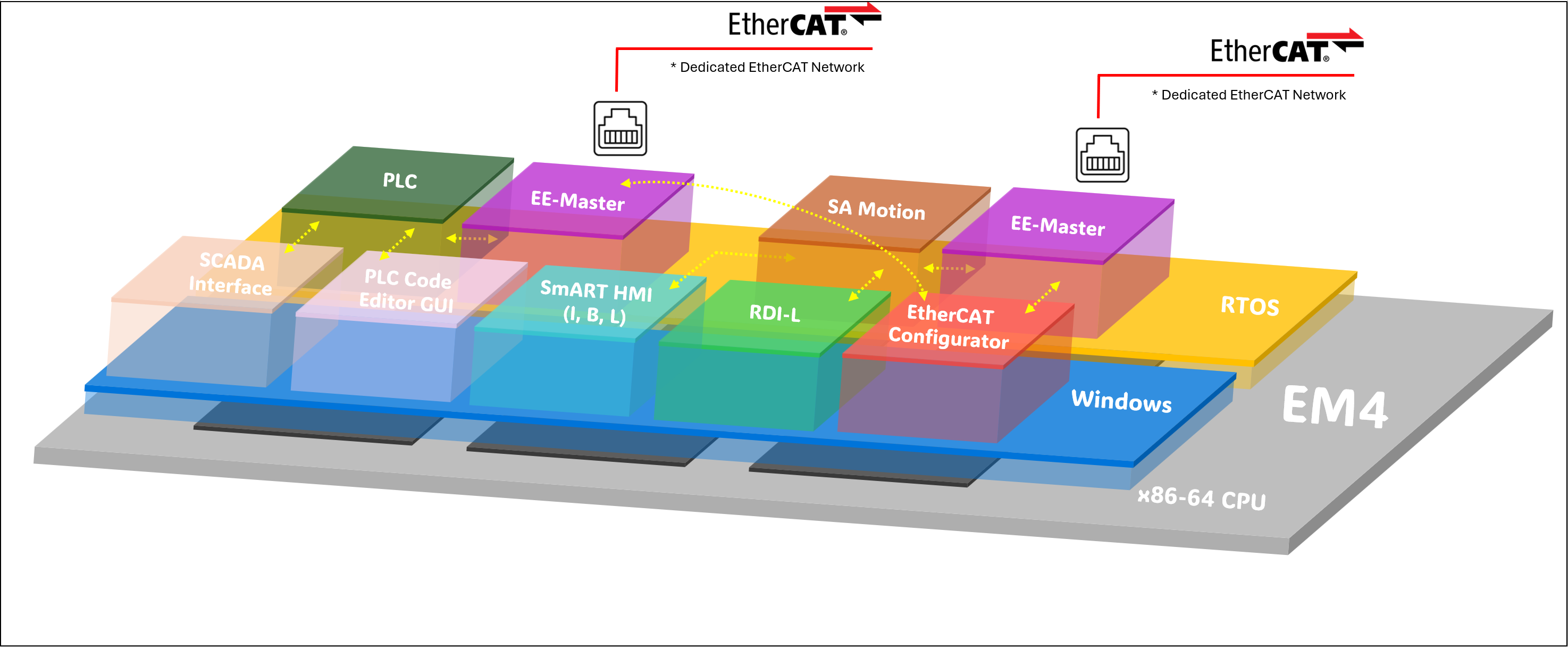
Independent Motion and PLC Networks
Deploy a dual-master architecture for applications requiring isolated EtherCAT networks. Separate masters provide dedicated bandwidth and deterministic performance for motion and PLC subsystems operating independently.
Comparison: EM4 vs EM3
The EM4 integrates industrial PC hardware, EtherCAT controller, and real-time operating system in a ruggedized enclosure designed for harsh factory environments. The EM3 provides external EtherCAT Master functionality for existing PC infrastructure, offering lower initial cost when suitable computing hardware already exists.
For applications requiring performance beyond EtherCAT capabilities, the KSMC-iX delivers proprietary 10 Gbps fiber communication and sub-200 µsec motion segmentation.
Fully Tested EtherCAT Devices
The following devices have been fully tested with the KSMC-EtherCAT Master Motion Controller.
| Manufacturer | Model | Type |
|---|---|---|
| MADHT1105B01 | Servo drive | |
| SGD7S | Servo drive | |
| R88D-KNA5L | Servo drive | |
| NXECC202 | IO Coupler | |
| ID4342 | IO Unit | |
| OD4121 | IO Unit | |
| RYT401S7-VCS2 | Servo drive | |
| EL7-EC400F | Servo drive | |
| FV3S-R3-NA2R8 | Servo drive | |
| EK1100 | IO Coupler | |
| EL1004 | IO Unit | |
| EL3001 | IO Unit | |
| EL4001 | IO Unit | |
| EL2004 | IO Unit |
More fully tested devices to come. If you questions regarding the compatibility of any component, please contact us today!
Sodick America EtherCAT Master Motion Controller (Product – EM4)
Frequently Asked Questions
What is the KSMC-EtherCAT Master 4 (EM4)?
The EM4 is a complete EtherCAT Industrial PC System integrating industrial-grade computing hardware, real-time operating system (TenAsys INtime or Xenomai Cobalt), EtherCAT network controller, and motion/PLC control software in a single ruggedized platform. It provides deterministic real-time performance for factory automation, CNC systems, and advanced manufacturing equipment without requiring custom PC configuration or validation.
Unlike PC-based software solutions that depend on standard computing hardware not designed for industrial environments, the EM4 combines extended temperature range components, fanless cooling, vibration resistance, and industrial-grade power supplies with optimized real-time software configuration. This integrated approach eliminates the integration overhead and compatibility risks of assembling control systems from separate components.
The EM4 serves as a turnkey solution for OEMs and system integrators requiring proven, reliable control platforms with vendor support for hardware, firmware, and control software, reducing development time and technical risk compared to building custom industrial PC systems.
What operating systems does the EM4 support?
The EM4 operates a dual-OS architecture running Windows (10 or 11) as the general-purpose operating system alongside a real-time operating system (TenAsys INtime or Realtime-Linux (Xenomai Cobalt, Preempt-RT) for deterministic control processing. This architecture enables non-time-critical applications like HMI, data logging, and configuration tools to run on Windows while motion control and PLC logic execute on the real-time OS with guaranteed timing performance.
OPERATING SYSTEM ROLES
Windows (GPOS – General Purpose OS):
- User interface and HMI applications
- Configuration tools, including EtherCAT Master Configurator
- Data logging and diagnostic software
- OPC-UA server and SCADA communication
- Non-deterministic application development
TenAsys INtime or Realtime-Linux (Xenomai Cobalt, Preempt-RT) (RTOS – Real-Time OS):
- EtherCAT network controller processing
- Motion control with deterministic cycle times
- PLC logic execution with consistent scan times
- Time-critical interrupt handling and servo processing
The dual-OS architecture isolates time-critical control functions from Windows application activity, ensuring consistent EtherCAT cycle times and motion control performance regardless of HMI rendering, data logging, or other non-deterministic processes running on the Windows side.
This separation enables engineers to develop user-facing applications in familiar Windows or Linux environments while maintaining industrial-grade real-time performance for control functions, combining ease of development with deterministic execution.
How many axes and motors can the EM4 control?
The EM4 EtherCAT controller supports up to 32 motors with 16 axes capable of coordinated interpolation, providing capacity for complex multi-axis machines including CNC machining centers, multi-spindle EDM systems, and automated assembly equipment requiring synchronized motion across multiple stations.
Control capacity breakdown:
- Total motors: 32 individual servo motors with independent control
- Interpolated axes: 16 axes with coordinated trajectory generation for simultaneous multi-axis motion
- Motion coordinate systems: Multiple independent coordinate systems for parallel control of machine sections
- EtherCAT I/O: Expandable digital and analog I/O through EtherCAT slave modules
The distinction between motors and interpolated axes is functionally important: all 32 motors receive independent servo control through the EtherCAT network, but coordinated interpolation (where multiple axes follow a synchronized toolpath) applies to up to 16 axes. Additional motors operate under independent position or velocity control, suitable for auxiliary functions like tool changers, coolant pumps, or material handling.
This scalable architecture supports machine designs from simple 3-axis systems to complex multi-station production equipment. The EtherCAT network controller architecture allows system expansion by adding EtherCAT servo drives and I/O modules without hardware changes to the EM4 platform.
For detailed specifications or application-specific configuration guidance, contact our automation specialists.
Can motion and PLC applications run together on EM4?
Yes, the EM4 executes motion control and PLC applications concurrently on the real-time operating system, enabling unified control architectures where motion commands and process logic interact with minimal latency. Both applications share the same deterministic execution environment and can access the EtherCAT network controller through a single master (Use Case #4) or dual master configuration (Use Case #5).
INTEGRATION APPROACHES
Single Master Configuration (Use Case #4):
- Motion and PLC applications share one EtherCAT network controller
- All servo drives and I/O modules connect to a single EtherCAT network
- Simplified wiring and network topology
- Coordinated control with direct inter-process communication
- Ideal for machines where motion and logic are tightly coupled
Dual Master Configuration (Use Case #5):
- Separate EtherCAT masters for motion and PLC subsystems
- Independent networks provide bandwidth isolation
- Motion network optimized for servo update rates
- PLC network handles I/O, safety systems, and process control
- Suitable for large systems where network segmentation improves performance or meets safety architecture requirements
Both configurations execute on the real-time OS with deterministic timing, ensuring consistent motion control cycles and PLC scan times. The EM4’s architecture eliminates the communication delays inherent in systems using separate motion controllers and PLCs connected through fieldbus interfaces.
Engineers develop motion programs and PLC logic using integrated development tools, with both applications accessing shared data structures for coordinated control. This unified programming environment reduces development complexity compared to multi-vendor control systems requiring gateway configuration and protocol translation.
Learn more about our complete EtherCAT automation solutions.
What is the benefit of a dual EtherCAT master configuration?
Dual EtherCAT master configuration provides independent network bandwidth and timing control for motion and PLC subsystems, enabling optimized cycle times and network topology for each application domain. This architectural separation benefits large, complex machines where motion control and process I/O have different performance requirements or where safety-rated PLC networks must operate independently from motion networks.
KEY ADVANTAGES
Performance Optimization:
- Motion network configured for high-frequency servo updates (62.5-250 µsec cycles)
- PLC network optimized for I/O processing and safety logic (62.5 µsec to 1 msec cycles)
- Each network maintains optimal performance without compromise from the other subsystems
Bandwidth Isolation:
- Large I/O networks don’t impact motion control timing
- Vision systems, RFID readers, or high-volume data devices operate on the PLC network without affecting servo communication
- Simplifies network design for systems with extensive distributed I/O
Functional Separation:
- Motion subsystem handles servo drives, spindle controls, and axis coordination
- PLC subsystem manages process I/O, safety networks (FSoE), and machine sequencing
- Separation aligns with functional safety requirements, where safety-rated PLC networks must be isolated
Scalability:
- Independent networks scale without mutual impact
- Adding motion axes doesn’t affect PLC network cycle time
- Expanding I/O doesn’t degrade motion control performance
The EM4’s dual master capability is implemented through multiple physical EtherCAT ports, each managed by independent master instances on the real-time OS. Both masters execute deterministically with coordinated timing, enabling synchronized operation while maintaining network independence.
For most applications, a single master configuration (Use Case #4) provides sufficient performance with simplified network topology. Dual master architecture suits complex machines, high-volume production lines, or applications with specific safety architecture requirements.
Developed by Sodick America’s engineering team, the EM4 platform supports both configurations without hardware modification—deployment choice based on application requirements rather than platform limitations.