
Our EtherCAT Master Board solutions deliver deterministic, real-time communication systems for industrial automation hardware. EtherCAT technology enables ultra-fast data exchange with microsecond-level precision, essential for synchronized motion control, distributed I/O networks, and converged motion-PLC architectures.
EtherCAT Master Stack
Cross-Platform EtherCAT Master Software
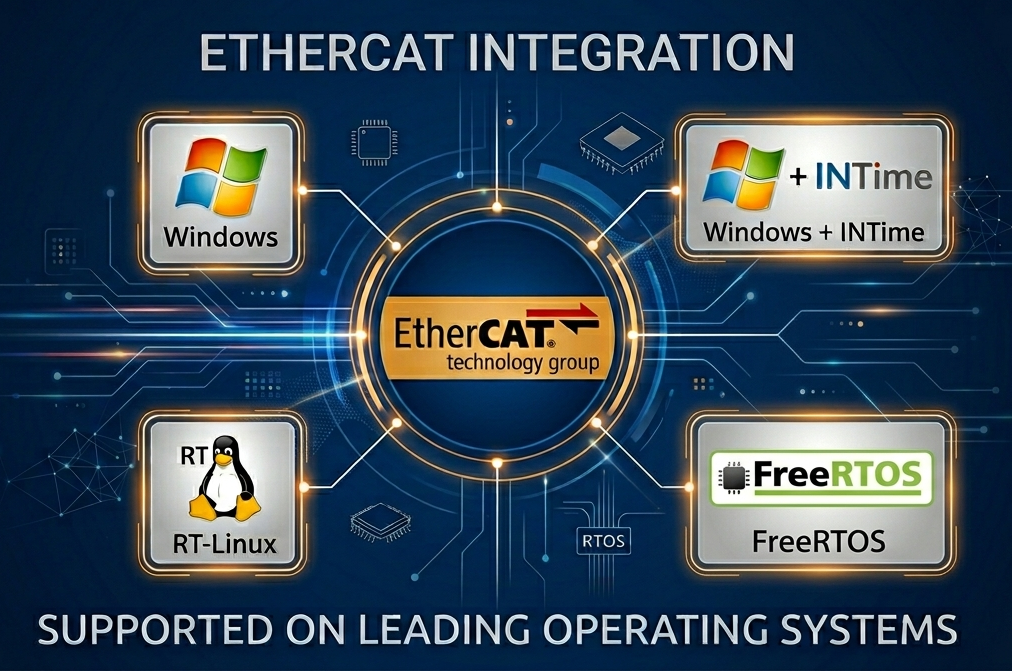
Sodick America’s proprietary EtherCAT Master Software Stack delivers deterministic real-time control through a single unified C/C++ API that runs natively across Windows, Windows + INtime, FreeRTOS, and RT-Linux. Deploy the same master core on whichever operating system best fits your application — without rewriting code.
✔ Runs natively on Windows, Windows + INtime, FreeRTOS, and RT-Linux
✔ Single unified C/C++ SDK — one API across all four platforms
✔ 62.5 μs minimum cycle time with sub-microsecond jitter
✔ Full EtherCAT protocol support (CoE, FoE, EoE, SoE) and up to 64K slave nodes

EtherCAT Master 3 (EM3)
External Hardware-Based EtherCAT Master Board
Transform any PC into an industrial motion controller with the EM3, an FPGA-based EtherCAT Master Board that delivers deterministic real-time communication without modifying your existing computer. The FPGA architecture ensures consistent cycle times independent of PC operating system overhead.
✔ FPGA-timed EtherCAT real-time control independent of PC load
✔ Fast deployment, operational in minutes
✔ Integrated IEC 61131-3 PLC with OPC-UA interface
✔ Hardware-based deterministic communication
EtherCAT Master 4 (EM4)
Industrial PC-Based Real-Time Communication System
A complete industrial automation hardware platform engineered for real-time EtherCAT control, multi-axis motion, and PLC functionality in a single rugged industrial PC. The EM4 eliminates integration complexity with a pre-configured, tested system ready for immediate deployment in harsh industrial environments.
✔ Complete industrial PC with integrated EtherCAT Master functionality
✔ Real-time communication system optimized for industrial automation
✔ Unified motion control and PLC on a single platform
✔ Rugged enclosure for harsh factory environments

Unified Motion, PLC, and EtherCAT Control Platform
Sodick America’s EtherCAT ecosystem integrates motion control, PLC logic, and real-time networking into a single software architecture. This convergence eliminates the complexity and latency of traditional distributed control systems, where separate controllers create integration challenges and performance bottlenecks.
EtherCAT -Master
Command.
Central EtherCAT configuration tool managing real-time communication across all connected devices. Configure network topology, assign addresses, and verify network integrity.
SA Motion
Move.
Advanced motion control algorithms optimized for EtherCAT-based servo systems. Supports coordinated multi-axis trajectories, electronic gearing, and complex path interpolation.

PLC
Control.
IEC 61131-3 compliant PLC environment running on the same EtherCAT real-time platform as motion control, eliminating communication delays between motion and logic.
RDI-L
Debug.
Captures and visualizes real-time motion behavior, servo feedback, and network performance metrics, accelerating commissioning and troubleshooting.
Key Features – Why EtherCAT Real-Time Technology Matters
- High-Performance, Deterministic Communication
- EtherCAT’s hardware-based frame processing delivers consistent cycle times regardless of network load. This enables synchronized motion across multiple axes with microsecond timing accuracy, which is essential for CNC machining, packaging equipment, and robotic assembly.
- Scalable Architecture
- Scale from single-machine configurations to factory-wide systems without performance degradation. The same EtherCAT Master Board controls standalone machines or coordinates hundreds of distributed I/O points and servo axes.
- Flexible Integration
- Supports multiple protocols beyond EtherCAT, including OPC-UA, Modbus TCP, and PROFINET gateways. Allows gradual migration from legacy systems without complete equipment replacement.
- Comprehensive Software
- Complete software stack including EtherCAT configuration tool, motion libraries, PLC development environment, and diagnostic tools. Pre-built function blocks accelerate development from concept to commissioning.
Applications – Industries Deploying EtherCAT Real-Time Automation
- Factory Automation
- Process Control
- Machine Building
- Automotive Industry
- Renewable Energy Systems
Benefits – What EtherCAT Master Board Technology Can Do For You
- Enhanced Efficiency
- Streamline your automation processes with reliable and high-speed communication.
- Reduced Downtime
- Minimize disruptions with robust and fault-tolerant networking solutions.
- Future-Proof
- Stay ahead with scalable and flexible technology that adapts to evolving industrial requirements.
Fully Tested EtherCAT Devices
The following devices have been fully tested with the KSMC-EtherCAT Master Motion Controller.
| Manufacturer | Model | Type |
|---|---|---|
| MADHT1105B01 | Servo drive | |
| SGD7S | Servo drive | |
| R88D-KNA5L | Servo drive | |
| NXECC202 | IO Coupler | |
| ID4342 | IO Unit | |
| OD4121 | IO Unit | |
| RYT401S7-VCS2 | Servo drive | |
| EL7-EC400F | Servo drive | |
| FV3S-R3-NA2R8 | Servo drive | |
| EK1100 | IO Coupler | |
| EL1004 | IO Unit | |
| EL3001 | IO Unit | |
| EL4001 | IO Unit | |
| EL2004 | IO Unit |
More fully tested devices to come. If you have questions regarding the compatibility of any component, please contact us today!
Frequently Asked Questions
What is an EtherCAT Master and why does it matter?
An EtherCAT Master is the central controller managing real-time communication across an EtherCAT network, coordinating data exchange between servo drives, I/O modules, and sensors with microsecond-level precision.
The Master is critical because it enables synchronized multi-axis motion control and deterministic timing that traditional fieldbuses cannot achieve. In CNC machining or robotic assembly, the EtherCAT Master ensures all devices execute commands simultaneously with timing accuracy that maintains precision across complex coordinated movements.
What is the difference between the EM3 and EM4?
The EM3 is an external EtherCAT Master Board connecting to your existing PC, while the EM4 is a complete industrial PC with integrated EtherCAT functionality.
EM3: Connects to any PC, FPGA-based timing, ideal for leveraging existing hardware, lower initial cost
EM4: Complete ruggedized system, plug-and-play deployment, designed for harsh environments, guaranteed compatibility
Choose EM3 for existing PC infrastructure. Choose EM4 for completely validated platforms or harsh environmental requirements.
Can the EM3 run with any PC?
The EM3 runs with all modern PCs with an extra LAN slot. The Field-Programmable Gate Array (FPGA) on the EM3 provides deterministic EtherCAT timing independent of PC load. The EM3 handles all the motion calculations and/or PLC logic.
Does the EM4 support harsh industrial environments?
Yes, the EM4 is engineered for harsh factory conditions:
- Vibration and shock resistant for machine-mounted installation
- Solid-state storage with no moving parts
- Industrial-grade locking connectors
Suitable for machining operations, welding cells, high-speed packaging, and outdoor installations.
How fast is EtherCAT communication on your controllers?
Sodick America’s EtherCAT Master Board solutions achieve cycle times as fast as 62.5 microseconds (µs)—16,000 cycles per second for high-speed motion control applications.
Performance:
- Minimum cycle: 62.5 µs
- Typical motion control: Achieve 125 µs cycle time with 32 motors
- Sub-microsecond distributed clock synchronization
These speeds enable precision positioning and coordinated multi-axis interpolation. Traditional fieldbuses operate at 2-10 ms cycles—30 to 160 times slower than EtherCAT.
What industries use EtherCAT-based automation systems?
Machine Tool & Metalworking: CNC systems requiring sub-micron positioning accuracy
Semiconductor: Pick-and-place, die bonders requiring microsecond synchronization
Packaging: High-speed equipment needing precise timing between multiple machines
Automotive: Robotic welding cells and assembly line automation
Medical Device: Surgical robotics and diagnostic equipment requiring deterministic performance
These industries share requirements for high-speed synchronized motion, scalability, and deterministic real-time performance. Learn more about our motion controller solutions.
Can these controllers integrate with existing hardware?
Yes, our EtherCAT Master solutions integrate with most industrial automation hardware through EtherCAT-compatible servo drives and industry-standard protocols.
Integration options:
- Direct EtherCAT compatibility: Major servo manufacturers (Yaskawa, Mitsubishi, Beckhoff, Delta etc.) offer compatible drives
- Protocol gateways: Connect legacy fieldbuses (PROFIBUS, CANopen, Modbus)
- Hybrid architectures: Upgrade critical axes while maintaining existing hardware
- OPC-UA/Modbus TCP: Integrate with existing HMI, SCADA, and IT systems
Contact our specialists for compatibility verification and migration planning.